



Laser scanning / LIDAR is a technique for capturing 3d spaces / sites / buildings by sending out thousands of light pulses from the scanner and calculating the distance to a surface according to the time taken for the beam to be reflected back.
The scanner carries out each scan by spinning a mirror vertically while the casing rotates 360 degrees horizontally. This way the device can scan (almost) everything that surrounds it and log this location information to each point in space.
Scans must be repeated around the site to fully capture all areas of the subject and eliminate any blind, hidden spots as much as possible. These scans must then be stitched together – registered – in scanning software to generate the full 3d representation of the site.
Due to the amount of data involved this registering process can take some time and effort – and will likely generate very large “point cloud” files. Well placed scans with enough overlap between them and with distinguishable common points are most likely to automatically register – but there may be some manual registering required too.

It is important to bear in mind that once processed these files are point clouds not meshes – so while they can be spun around and viewed, sectioned or interrogated for measurements etc. they are not standard geometry that can be opened and directly manipulated in 3d software such as Rhino and 3D Studio. Perhaps think of the point cloud as mist – you can see it, and affect it, but you can’t grab hold of it.
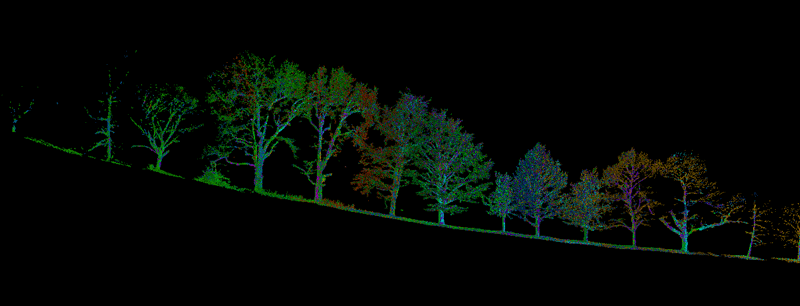
There are a number of methods for converting point cloud data into standard meshes – but this can be difficult and still produce poor results, especially with complex shapes like trees and very irregular objects. Rather than attempting to create a mesh model of your scan set it may be better to focus on how to use the raw point cloud itself for projects.